DOI Seite / Zitierlink:
https://doi.org/10.11588/diglit.36493#0011


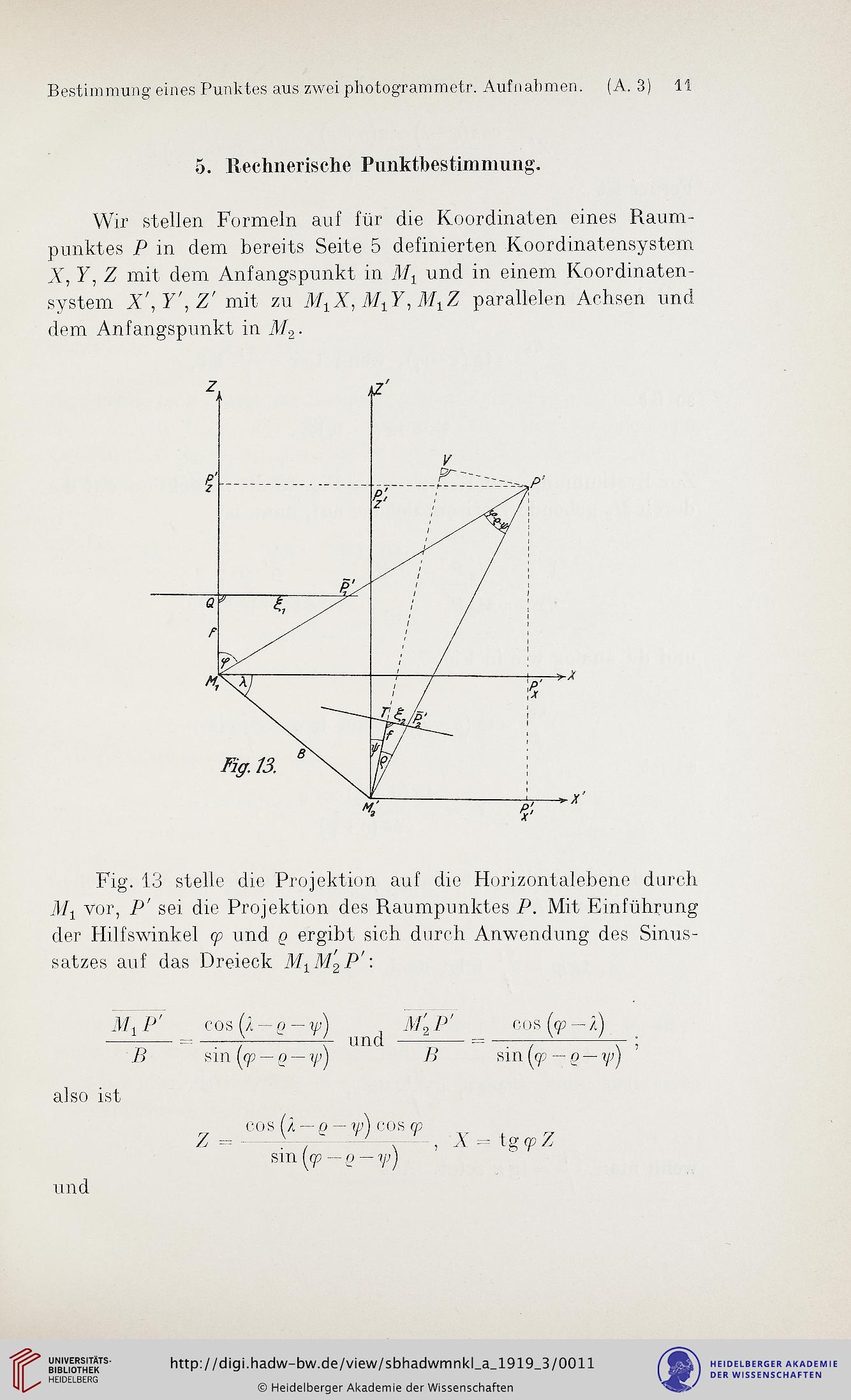
Bestimmung eines Punktes aus zwei photogrammctr. Aufnahmen. (A. 3) 11
5. Rechnerische Pmikthestinmmng.
Wir stellen Formeln auf für die Koordinaten eines Raum-
punktes P in dem bereits Seite 5 definierten Koordinatensystem
X, F, Z mit dem Anfangspunkt in ;t/j und in einem Koordinaten-
system X', F', Z' mit zu d^X, d^F, d^Z parallelen Achsen und
dem Anfangspunkt in dp-
z
Fig. 13 stelle die Projektion auf die Hurizontalebene durch
d/i vor, P' sei die Projektion des Raumpunktes P. Mit Einführung
der Hilfswinkel und p ergibt sich durch Anwendung des Sinus-
satzes auf das Dreieck df^df^ -
d/iP' COs(/.—-o — y)
si n f — p — ipj)
also ist
und
5. Rechnerische Pmikthestinmmng.
Wir stellen Formeln auf für die Koordinaten eines Raum-
punktes P in dem bereits Seite 5 definierten Koordinatensystem
X, F, Z mit dem Anfangspunkt in ;t/j und in einem Koordinaten-
system X', F', Z' mit zu d^X, d^F, d^Z parallelen Achsen und
dem Anfangspunkt in dp-
z
Fig. 13 stelle die Projektion auf die Hurizontalebene durch
d/i vor, P' sei die Projektion des Raumpunktes P. Mit Einführung
der Hilfswinkel und p ergibt sich durch Anwendung des Sinus-
satzes auf das Dreieck df^df^ -
d/iP' COs(/.—-o — y)
si n f — p — ipj)
also ist
und